�ԓ��V�����K�C�h�̎���i��ҁj
�|�����x���[�^�h���C�u�̎����Ɍ����ā|
����@��V
�P�D�͂��߂�
�O�҂ł͎��Ԑꖢ�������������߁A��Ƀn�[�h�E�F�A�𒆐S�Ƃ�������L�Ƃ��A�X�e�b�s���O���[�^���M�A�̖]�����ւ̎��t���Ƃ��̃R���g���[��������ʐ^�E��H�}�������ďЉ�܂����B
��http://www.d1.dion.ne.jp/~ueharas/seiten/gt30/sekidogi.htm
�O�҂ŏ����Y�ꂽ�̂ł����A����g�p�������[�^���M�A���w�������Ƃ��̃~�U�[���{�ЖK��L����͓S����21���Ɍf�ڂ��Ă���܂��B���������������܂����炲�����������B
��http://www.d1.dion.ne.jp/~ueharas/seiten/gt21/mizar.htm
��҂ł́A�O�҂Ő��삵�����[�^�h���C�u���쓮���邽�߂̃\�t�g�E�F�A�J���Ɗ�����̕]���ɂ��ďЉ�A�����҂Ƃ����Ă��������܂��B
�Ȃ��O�Ҍ��J��ATA7291SG�̃f�[�^�V�[�g��ǂݕԂ��Ă�����Vref�Ƀv���A�b�v��R������悤�w������Ă���̂����܂����̂ʼn�H�}���C�����܂����B���킹�đO��30���̉�H�}�������Ⴒ���Ⴕ�Ă����̂ŁA�]�v�ȕ������Ȃ��Đ}1�ɍČf�ڂ��܂��B
�@
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�}1�D�S��H�}�i�C���Łj
�Q�D�p���X���̌v�Z
�~�U�[������w�������X�e�b�s���O���[�^�́i���j�O���Ђ�P43-2130(12)�ŁA2��2�㎥�i�o�C�|�[��2���㎥�j�ŋ쓮������^�C�v�ł��B���̃��[�^�̃X�e�b�v�p�x��15���ł��̂�24�X�e�b�v��1��]���܂��B
�����w�������M�A���j�b�g��5�i�Ō���������\���ő��M�A���1�F500�ł����B����ɃM�A���j�b�g����ԓ��V�ւ̐ڑ��M�A��1:2.5�Ɛԓ��V���̂̃E�H�[���M�A��1�F144�A����ɏ�q���܂���24�X�e�b�v�^��]��S�Ċ܂߂��1�F4,320,000�ƂȂ�܂��B�����432���X�e�b�v�Őԓ��V�����傤��1��]���邱�Ƃ��Ӗ����܂��B
���z��1���œ����ʒu�ɖ߂�܂��̂ŁA�����ǔ�����ꍇ�A1���Őԓ��V��1��]������K�v������܂��B����������432���X�e�b�v�^24���Ԃ̋쓮�p���X��^����悢���ƂɂȂ�܂��B�����1�b�Ɋ��Z����Ƃ��傤��50�X�e�b�v�ƂȂ�܂��B
���z�ɔ�ׁA�P���ƌ��̒ǔ��͌v�Z��������ƕ��G�ł��B�P���͑��z��������i�݁A���͒x��܂��B�P���̑��z�Ƃ̂����1�N�ł��傤��1������360���ƂȂ肱�̂�����l�����Ȃ���Ȃ�܂���B���͂���ɕ��G�ŁA�n���������]�ƒn����ʂ��đ��z�������]�̗������l������K�v������܂��B
�V���N�ӂ̃f�[�^�����p���A�ԓ��V1��]�̎��Ԃ����̂Ƃ���v�Z���܂����B
���z�F86,400.00�b�^��]
�P���F86,164.09�b�^��]�c�V���N�ӂ�1�P���������Ɍv�Z
���@�F89,428.33�b�^��]�c�V���N�ӂ�1��]�������Ɍv�Z
���̐��l����A���[�^1�X�e�b�v�̎������܂��i�\1�j�B
|
�@ |
�ԓ��V |
���[�^���x |
�X�e�b�v���� |
|
���z |
86,400.00 |
50.00000 |
20.00000 |
|
�P�� |
86,164.09 |
50.13690 |
19.94539 |
|
�� |
89,428.33 |
48.30684 |
20.70100 |
��4,320,000�X�e�b�v�^��]�Ōv�Z
�\1�D���[�^�h���C�u�̃X�e�b�v�����v�Z
���̕\1�̃X�e�b�v�������Ƀ^�C�}���荞�݂������ăX�e�b�s���O���[�^�̔g�`�X�e�b�v��i�߂�A���m�ȑ��x�Œǔ��ł��܂��B
���ۂɂ́g�{���{�^���h��݂������߁A����1�^2�̎����Ń^�C�}���荞�݂������A������2�����œ��삳���Ă��܂��B
�R�D���[�^�쓮�p���X�̐���
�O���ł��q�ׂ܂������A����̃X�e�b�s���O���[�^��2��2�㎥�i�o�C�|�[��2���㎥�j�ŋ쓮�����Ȃ���Ȃ�܂���B2��2�㎥�̓������O���Ђ̃J�^���O������p����ƁA�u2���Ɋ����ꂽ�X�e�[�^�[�R�C���ɓd���]�������2���Ƃ��㎥��������ŁA�R�C���̗��p���������A��������d�͂̏ꍇ4��2�㎥�Ɣ�r����50���O��̃g���N�A�b�v���ł��A�㎥�����Ƃ��čł��D��Ă��܂��v�Ə�����Ă��܂��B���ʁA�R�C�������d���𐳋t���]������K�v����ǂ����Ă���H�����G�ɂȂ�܂����A�O���Љ���h���C�oIC
TA7291SG�i���Łj���g�p���邱�Ƃł�����������Ă��܂��B
��2��2�㎥�i�o�C�|�[��2���㎥�j�̔g�`��
2�̃R�C����90���ʑ������点���g�`�������܂��B
�v���O�����ł̓�1��2�g�`���]�i�{���|�܂��́|���{�j�̃^�C�~���O�Ń^�C�}���荞�݂������A���̔g�`�ɂ��킹���d�����h���C�oIC����o�͂����܂��B
�h���C�oIC TA7291SG�̃f�[�^�V�[�g�w���ɂ��������A���]���Ɂ{���|���g�����W�X�^�̓����n�m������邽�ߖ�100�ʂr�̗��g�����W�X�^�n�e�e�^�C�~���O��݂��Ă��܂��B
 �@�@
�@�@
�@�@�@�@�@�@�@�@�}2�D�X�e�b�s���O���[�^�ɉ�����g�`
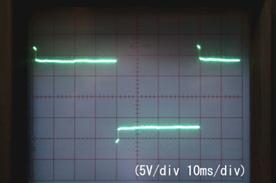
������Ɏ��ۂ̔g�`���I�V���X�R�[�v�Ŋϑ����Ă݂܂����i�ʐ^1�A�ʐ^2�j�B
���t�ؑւ����̗��g�����W�X�^�n�e�e�̏�ԁi��100�ʂr�j���킩��܂��ł��傤���H
��R���ׂ̏ꍇ�͂��̊Ԃ�0�u�ł����A���[�^���ׂ̏ꍇ�̓R�C���̋t�N�d�͂̉e���Ŕg�`���t�����ɐU���Ă���̂��킩��܂��B�d���d���������������Ƃ���Ŏ~�܂��Ă���̂̓h���C�uIC�ɓ�������Ă���t�N�d�͖h�~�_�C�I�[�h�̓����ɂ����̂ł��B
�ʐ^1�D���ۂ̔g�`1�i��R���ׁj�@�@�@�@�@�@�ʐ^2�D���ۂ̔g�`2�i���[�^���ׁj �S�D�\�t�g�E�F�A�̃v���O���~���O 1�`�b�v�}�C�R����PIC�V���[�YPIC16F84A���g���܂����̂ŁA���̊J������p�ӂ���K�v������܂��B�}�C�N���`�b�v�e�N�m���W�[�Ѓz�[���y�[�W����J���c�[��MPLAB���_�E�����[�h�E�C���X�g�[�����Ă�����g���܂��B�v���O�����J����MPLAB�����̃A�Z���u���ōs���܂����B ���C�����[�`���͏����ݒ�݂̂Ƃ��A����ȍ~�̓���͑S�ă^�C�}���荞�݃��[�`���̂Ȃ��Ńv���O���~���O���Ă��܂��B ���^�C�}���荞�݂ł̏�����
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�}3�D�S�̃t���[�`���[�g �T�D������̕]�� �@�d���͒P3�[�d�d�r�܂��͒P3���d�r8�{�Ƃ��� ����͑O���̃n�[�h�҂ł��Љ�܂����Ƃ���P3�~8�{�̓d�r�z���_�[����������Ă���d�l�ǂ���ł��B �A12���Ԓ��x�͘A���쓮�������邱�� �c�O�Ȃ��炱��͎����ł��܂���ł����B����d�������������208���`�ł����̂ŁA�g�p�����O�m�̃G�l���[�v�i2000���`���j�ł�9����37���œd�r�����Ղ���v�Z�ɂȂ�܂��B���[�d��Ԃ��烂�[�^��A����]�E���u�����܂�����A���R�҂�����9����37���Ń��[�^����~���܂����B 9���Ԉȏ�Ƃ������Ƃ͂ق�1�ӑ��v�ł����A�\���̓d�r��1�Z�b�g�����Ă����Ζ��Ȃ��̂ŖڕW���B���ł����n�j�Ƃ��܂��B�P3�d�r�Ȃ�R���r�j�ł������܂����c �B�ł���Ύ��v���݂̐��x�����������邱�� ����g�������Z����12�D8�l�g���������x�N���X�^�����W���[�������̂܂��g���J�E���^�ő��肷��ƁA���̖��̂Ƃ��荂���x�ł��邱�Ƃ��킩��܂����i�ʐ^3�j�B ���̌��ʁA�����i1���Ԃ̃^�C�}�����ݐ�����덷�v�Z�j�łP��������̌덷���P�b�ȓ��Ɏ��܂��Ă��邱�Ƃ��m�F�ł��܂����i�\2�j�B �@ �X�e�b�v�� 1��������� ��������@�� �@����ON���Ԃ̃^�C�}�����݉��J�E���g���A���̌��ʂ�EEPROM�ɕۑ�����悤PIC�v���O������lj��B �A�o���u�B�e�p�̃^�C�}�R���g���[�� TC-80N3a����1���Ԃ�ON�M������́B �J�E���g������덷�v�Z����B ���z 360,001 -0.22 �P�� 360,983 +0.64 �� 347,807 +0.50 �\2�F�X�e�b�s���O���[�^���䐸�x���� ��ɂ���TC-80N3a�̐��x��+4.3�b/���Ǝv������舫�������̂ŁA�\2�̃X�e�b�v���͂��̕��̕�������Ă��܂��B�ŏI���x��1��������P�b�ȉ��ɔ[�܂�܂����̂Ŏd�l�́g���v���݂̐��x�h�͎����ł����Ɣ��f���܂��B �@�@�@�@�����A���������C���E�Ɏ����킹�̐��x�E�]�����d�݂��炭��c�݂̉e���̂ق����傫���ƍl���Ă���A������͍���̒����ۑ�Ƃ����Ă��������܂��B �C�쓮���x��3�i�K�i�P���E���z�E���j�ؑւ��\�Ƃ��邱�� �D�������p�ɒ�~�E�{���{�^����݂��邱�� ����2�̓n�[�h�X�y�b�N�ł��̂Ŏ����ł��Ă��܂��B�e�X�g�ł����Ȃ����삵�Ă��邱�Ƃ��m�F���Ă��܂��B �U�D������ ����A�����B��łȂ��Ȃ��s���g�����킹��ꂸ�A�ߊ�E�V��E������3�_�Z�b�g�̎����̌��E�������܂����B�}�j���A�����œ_�ł��I�[�g�t�H�[�J�X�������Ƒ�ς��肪�����̂ł������̎����͓�����ł��ˁB �Ō�ɍ��삵�����[�^�E�R���g���[���Ɩ]�����ɓ��ڂ����Ƃ�������Љ�܂��B���Ɍ����Ă���~�U�[��CX-150(15cm����)�����̐ԓ��V�ɓ��ڂł���悤�ɉ������Ă��܂��B ������̎��͂����̂������Љ���Ă��������܂��B�ł͂܂��B
�@�@�@�@�ʐ^4�F�ԓ��VAR-1�{�M�A�@�@�@�@�ʐ^5�F���[�^�h���C�u�R���g���[�� �@�@ �ʐ^6�F���[�^�h���C�u�{120SL�i���Ɍ�����̂��~�U�[��CX-150�j ���t�^1�F�ʐ^���悭�Ȃ����H�H�i�����B��j�� �B�e�n�͎����ԂŖ�1���ԏ��X�̈ɓ����������Ɉʒu����V�鍂���B�V�̎ʐ^�̎B�e�n�Ƃ��Ă��m���Ă����̂ō��߂čs���Ă݂܂������A�ɓ��̊X������̉e�������̋��邭���҂͂���ł����B�܂肪���̓V��̒��A����ł��������B�e�ł��܂����̂ł��̂�����3�����f�ڂ��܂��B���\�����������������̃K�C�h�����肵�Ă��Ȃ��̂�������҂�c�O�ł��B�����A�K�C�h�X�R�[�v����Ɍ��Ȃ�������n���h��������������܂łƔ�ׂ�Ɗi�i�Ɋy�ɂȂ����͎̂����ł��B�[��̋A�蓹�A���H�e����\�����̎��̂���������܂����B �V�C�̂������A�����Ə����̗ǂ��������������ߕӂōă`�������W���܂��B�O�x�R�̐��͖{���ɂ��ꂢ�ł����ˁB���m�R�������܂����ł��B �ȉ�3�_�̎ʐ^�S�Ă̎B�e�f�[�^�������ł��̂ōŏ��ɂ܂Ƃ߂ċL�ڂ��Ă����܂��B �B�e���^�ꏊ 2009�N11��21���i�y�j�^�É����V�鍂�����ԏ� �]���� �~�U�[��120-SL�iD��120mm�AF��720mm�j �J���� �L���m�� EOS
kiss Digital X �{�f�B �B�e���� ���œ_ �h�r�n���x 800 �I�o���� 10���A�m�C�Y�����@�\ON�@�i3���Ƃ��j � �v������薾�邩�����̂ŊK����������Ă��܂��B Presto!
ImageFolio 4 �ŏ��������������߂܂����B �f�W�^���͂���Ȃ��Ƃ��ȒP�ɂł���̂������ł��ˁB �@�@�@
�ʐ^7�D�l45�v���A�f�X���c �ʐ^8�D�l31�A���h�����_��́@�i�ҏW�Ғ��F�����\���j
�ʐ^9�D�l42�I���I���启�_ ���t�^2�F�S�v���O�����\�[�X���X�g�� �v���Ԃ�̃A�Z���u������ł��B�璷�ȕ���������܂����Ƃ��e�͂��������B ;******************************************** ; This program is AUTO GUIDE CONTROLLER ;
for PIC16F84 ;******************************************** LIST P=PIC16F84A,R=DEC INCLUDE "P16F84A.INC" __CONFIG
_HS_OSC & _WDT_OFF & _PWRTE_ON & _CP_OFF ;********************************** ;�@�ϐ��̃��W�X�^�[�ւ̊��蓖�Đݒ� ;********************************** ;�����W�X�^�� ST_CNT EQU 0DH ;��ԃJ�E���^�i���荞�ݖ��ɂb�|�t�o�j LED_CNT EQU 0EH ;�k�d�c�J�E���^�i�k�d�c�o�̓X�e�[�^�X�j T1 EQU 0FH ;�⏕�^�C�}�J�E���^�i��^�C�}�j W_CNT EQU 10H ;�g�`��ԃJ�E���^�i�o�̓X�e�[�^�X�j OUT_A EQU 11H ;�|�[�g�`�o�b�t�@�i�g�`�o�́j ;���h�^�n�|�[�g�`�� U3_1 EQU 0 ;�g�`�o�� U2_1 EQU 1 ;�g�`�o�� U3_2 EQU 2 ;�g�`�o�� U2_2 EQU 3 ;�g�`�o�� LED EQU 4 ;�k�d�c�o�� ;���h�^�n�|�[�g�a�� DS_MOON EQU 0 ;�f�B�b�v�X�C�b�`�|�� DS_STAR EQU 1 ;�f�B�b�v�X�C�b�`�|�� PB_FAST EQU 2 ;�����{�^���X�C�b�`�|�{�� PB_STOP EQU 3 ;�����{�^���X�C�b�`�|��~ ;���g�`�o�̓f�[�^�� OUT_0 EQU 0011B OUT_1 EQU 0010B OUT_2 EQU 0110B OUT_3 EQU 0100B OUT_4 EQU 1100B OUT_5 EQU 1000B OUT_6 EQU 1001B OUT_7 EQU 0001B ;********************************** ;�@�^�C�}�E�J�E���^�萔 ;********************************** TM_SUN EQU 132 ;�^�C�}���荞�݃Z�b�g�i���z�j TM_STAR EQU 132 ;�^�C�}���荞�݃Z�b�g�i���j TM_MOON EQU 127 ;�^�C�}���荞�݃Z�b�g�i���j CN_SUN EQU 80 ;��J�E���^�Z�b�g�i���z�j CN_STAR EQU 52 ;��J�E���^�Z�b�g�i���j CN_MOON EQU 27 ;��J�E���^�Z�b�g�i���j CN100US EQU 80 ;100us�I�t�J�E���^ ;********************************** ;�@�v���O�����J�n ;********************************** ORG 0 ;���C���v���O�����J�n�Ԓn�փW�����v GOTO ORG 4 ;���荞�݊J�n�Ԓn�փW�����v GOTO
T_INT ;********************************** ;�@���C���v���O���� ;********************************** MAIN ;�������珉������ ;���y�[�W1�̃��W�X�^�ݒ聄 BCF STATUS,RP1 BSF STATUS,RP0 ;�y�[�W1�̃��W�X�^�ݒ� CLRF TRISA ;�|�[�g�`��S�ďo�̓��[�h MOVLW 11111111B ;�|�[�g�a��S�ē��̓��[�h MOVWF TRISB ;�@�@�@�@�V MOVLW 00000111B ;OPTION���W�X�^�����ݒ� MOVWF OPTION_REG ;�@�@�@�@�V ;���y�[�W0�̃��W�X�^�ݒ聄 BCF STATUS,RP0 ;�y�[�W0�̃��W�X�^�ݒ� MOVLW 00010000B MOVWF PORTA ;�|�[�g�`�����l�o�� CLRF INTCON ;�S���荞�ݕs���� ;�����W�X�^������Ԑݒ聄 CLRF ST_CNT ;��ԃJ�E���^���Z�b�g CLRF LED_CNT ;�k�d�c�J�E���^���Z�b�g MOVLW 8 ;�g�`��ԃJ�E���^�Z�b�g MOVWF W_CNT ;�@�@�@�@�V CLRF OUT_A ;�|�[�g�`�o�b�t�@�����l�ݒ� MOVLW TM_SUN ;�^�C�}���荞�ݏ����l���ԃZ�b�g MOVWF TMR0 ;�@�@�@�@�V MOVLW CN_SUN ;�⏕�^�C�}�J�E���^�����l�Z�b�g MOVWF T1 ; �V ;�����荞���� BSF INTCON,T0IE ;�^�C�}���荞���� BSF INTCON,GIE ;�^�C�}���荞���� ;�����C���v���O������~�� LOOP1 GOTO LOOP1 ;���C�������͂����Œ�~ ;********************************** ;�@���荞�݃v���O���� ;********************************** ;���^�C�}���荞�ݏ������[�`���� T_INT BCF INTCON,T0IF ;�^�C�}���荞�݃t���O���Z�b�g BTFSS PORTB,DS_STAR ;�c�r�v�����H GOTO AJ_STAR ;���̎��ԕ�� BTFSS PORTB,DS_MOON ;�c�r�v�����H GOTO AJ_MOON ;���̎��ԕ ;�����z�̎��ԕ�� AJ_SUN MOVLW CN_SUN MOVWF T1 SUN_LOOP DECFSZ T1,F GOTO SUN_LOOP ;���ԕ3�T�C�N�����[�v NOP NOP MOVLW TM_SUN ;�^�C�}���荞�ݑ��z�����l���ԃZ�b�g MOVWF TMR0 ;�@�@�@�@�V ;�k�d�c�_������ BTFSS LED_CNT,3 GOTO SUN_OFF BCF PORTA,LED ;�k�d�c�@�n�m GOTO PB_CHK SUN_OFF BSF PORTA,LED ;�k�d�c�@�n�e�e GOTO PB_CHK ;�����̎��ԕ�� AJ_STAR MOVLW CN_STAR MOVWF T1 STAR_LOOP DECFSZ T1,F GOTO STAR_LOOP ;���ԕ3�T�C�N�����[�v MOVLW TM_STAR ;�^�C�}���荞�ݐ������l���ԃZ�b�g MOVWF TMR0 ;�@�@�@�@�V ;�k�d�c�_������ MOVF LED_CNT,W ANDLW 00111000B BTFSS STATUS,Z GOTO STAR_OFF BTFSS LED_CNT,2 GOTO STAR_OFF BCF PORTA,LED ;�k�d�c�@�n�m GOTO PB_CHK STAR_OFF BSF PORTA,LED ;�k�d�c�@�n�e�e GOTO PB_CHK ;�����̎��ԕ�� AJ_MOON MOVLW CN_MOON MOVWF T1 MOON_LOOP DECFSZ T1,F GOTO MOON_LOOP ;���ԕ3�T�C�N�����[�v NOP NOP MOVLW TM_MOON ;�^�C�}���荞�������l���ԃZ�b�g MOVWF TMR0 ;�@�@�@�@�V ;�k�d�c�_������ MOVF LED_CNT,W ANDLW 00110000B BTFSS STATUS,Z GOTO MOON_OFF BTFSS LED_CNT,2 GOTO MOON_OFF BCF PORTA,LED ;�k�d�c�@�n�m GOTO PB_CHK MOON_OFF BSF PORTA,LED ;�k�d�c�@�n�e�e GOTO PB_CHK ;���o�a�`�F�b�N�� PB_CHK INCF ST_CNT,F ;��ԃJ�E���^�C���N�������g BTFSS PORTB,PB_STOP ;�o�a��~�H GOTO LED_OFF ;�k�d�c�I�t BTFSS PORTB,PB_FAST ;�o�a�{���H GOTO WAVE1 ;�g�`���� BTFSC ST_CNT,0 ;�����H GOTO WAVE1 ;�g�`���� GOTO END_INT ;���^�[�� ;���g�`������ WAVE1 INCF LED_CNT,F ;�k�d�c�J�E���^�C���N�������g DECF W_CNT,F MOVF W_CNT,W CALL GET_WAVE MOVWF OUT_A MOVF PORTA,W ANDLW 00010000B IORWF OUT_A,W MOVWF PORTA MOVF W_CNT,F ;�g�`��ԃJ�E���^��0�H BTFSC STATUS,Z GOTO W_DFT T_100US MOVLW CN100US MOVWF T1 T100_LOOP NOP DECFSZ T1,F GOTO T100_LOOP ;100�����x�� WAVE2 DECF W_CNT,F MOVF W_CNT,W CALL GET_WAVE MOVWF OUT_A MOVF PORTA,W ANDLW 00010000B IORWF OUT_A,W MOVWF PORTA MOVF W_CNT,F ;�g�`��ԃJ�E���^��0�H BTFSS STATUS,Z GOTO END_INT W_DFT MOVLW 8 ;�g�`��ԃJ�E���^�Z�b�g MOVWF W_CNT ;�@�@�@�@�V GOTO END_INT ;���k�d�c�J�E���^���Z�b�g�� LED_OFF CLRF LED_CNT ;�k�d�c�J�E���^���Z�b�g ;�����C�����A�� END_INT RETFIE ;���g�`�����f�[�^�T�u���[�`���� GET_WAVE ANDLW 0FH ;����4�r�b�g�̂ݎ��o�� ADDWF PCL,F ;�o�b���W�X�^�ɐ����������ăW�����v RETLW OUT_0 RETLW OUT_1 RETLW OUT_2 RETLW OUT_3 RETLW OUT_4 RETLW OUT_5 RETLW OUT_6 RETLW OUT_7 ;�����X�g�̏I��聄 END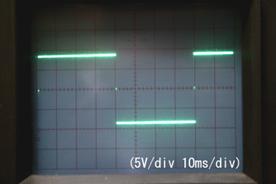 �@
�@
�@�@���[�h�r�v�i�P���E���z�E���j�A���x�r�v�i��~�E�{���j�̔���
�@�A1�X�e�b�v�����̃^�C�~���O�����i�g�`�ؑփ^�C�~���O�j
�@�B�X�e�b�s���O���[�^�ւ̔g�`��������яo��
�@�C�g�`���]���̃g�����W�X�^�����n�m��������i100�ʂr�@�n�e�e�j
�@�D���[�h�k�d�c�_�ŏ���
�}3�Ƀt���[�`���[�g�������܂��B�\�[�X�v���O�����͍Ō�ɓY�t���Ă����܂��B
�O�҂ŋL�ڂ���5�̊�{�d�l�������ł����̂������ږ��Ɋm�F�E�]�����܂��B
�@�@�@�@�ʐ^3�D�N���X�^�����W���[���̐��x
����8�����x���ێ��ł���Δ��N�Ŗ�1�b�̌덷�ƂȂ�܂����A���ۂɂ͂���Ƀ\�t�g�E�F�A�̌덷���܂߂Ȃ���Ȃ�܂���B�^�C�}���荞�݂����ł͂ǂ����Ă����x��ǂ����߂Ȃ����߁A�J����MPLAB�V�~�����[�V�������[�h����g���A�J��Ԃ����[�v��Ō��NOP�̑}���Ŕ��������܂����B
(step/���ԁj
�덷(sec/��)
�B�����EEPROM�̃f�[�^��ǂݏo���A����
52�ɂ��ċv���Ԃ�ɉ�H�v�E����E�v���O�����ɒ��킵�܂����B�Ⴂ����̂悤�ɃX���[�Y�ɂ͂����܂��A���Ƃ����������Ƃ��ł��܂����B�\�t�g�J���͓��̃g���[�j���O�ɂ͂悳�����ł��̂ŋ@�����܂��`�������W�������Ǝv���Ă��܂��B�V���W�ʼn�������ӗ~���o�Ă��܂������͓S���ŏЉ���Ă��������܂��B �@
�@

�����������삵�����[�^�h���C�u�����K�C�h�ł��B�O�҂ł����܂����Ƃ��莎���B����s���܂����̂ł��̐��ʕ����Ă��������܂��B

���Ȃ��݂̂l45�v���A�f�X���c�i����j�ł��B�V�鍂���ɓ��������Ƃ�����ڗ����Ă����̂ł����]�����������܂������A����͋A��钼�O�ɎB�蒼�������̂ł��B�g�傷��Ƃ킩��̂ł������̉e���ł��ׂĂ̐���2�d���ɂȂ��Ă��܂��܂����B�����ł���F�̃K�X�����������͂����肷�邭�炢�I�o���Ԃ�������Ƃ悩�����Ǝv���܂��B
�����K�C�h�����������琥��B�肽��������ʑ̂ł��B�l45���l���������I�o���Ԃ�������Ɣ��͂��o���Ǝv���܂��B���ׂ̋�͂Ƃ͂���230�����N�̌�䊂͂����Ă��_��I�ł��B720�������œ_�ł͉�ʂɓ��肫��܂���̂Ŗ]�������Y�̕����悩���������B

�L���ȃI���I���̑启�_�ł��B10���I�o�ł��ꂾ���ʂ�܂����B���Q�̉e���őS�̂������ۂ������̂ŋ��߂ɕ�������Ă��܂��B�ԐF�����������o��ΐ\�����Ȃ��̂ł����B